

Contact Us
If you need assistance, please reach out to us.
Phone: (800) 226 – 1013
Email: mctrans@ce.ufl.edu
To assist you better, please have your TSIS version and serial number available. It can be found by selecting Help, then clicking ‘About TSIS’. If possible, please share any input/project files as this will help us address any issues you may have.
Tips and Frequently Asked Questions
The section below contains our most frequently asked questions.
Network Editing (TSIS) FAQ
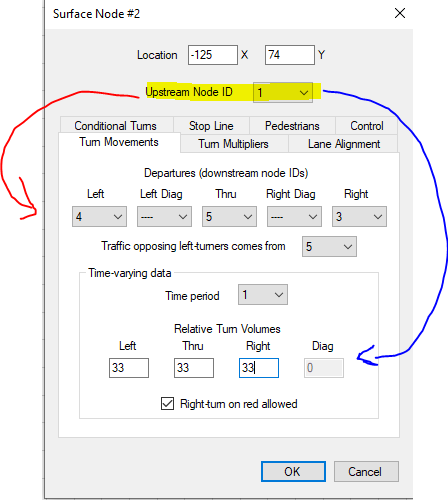
For each node, users must specify turning movements and volumes for every linked upstream node (highlighted). Each traffic movement from an upstream node must be linked to at least one destination node, ensuring that the destination is not the same as the upstream node. Additionally, users must detail the expected traffic volume for these turns, which can be presented as a total demand, in proportional ratios, or as a percentage out of 100. When specifying to/from entry/exit nodes, there must only be a through movement of volume 100. It’s important to note that TSIS-CORSIM will automatically generate turning movements and volumes when attaching links between nodes, but users should verify their results, as only some approaches may be automatically modeled.
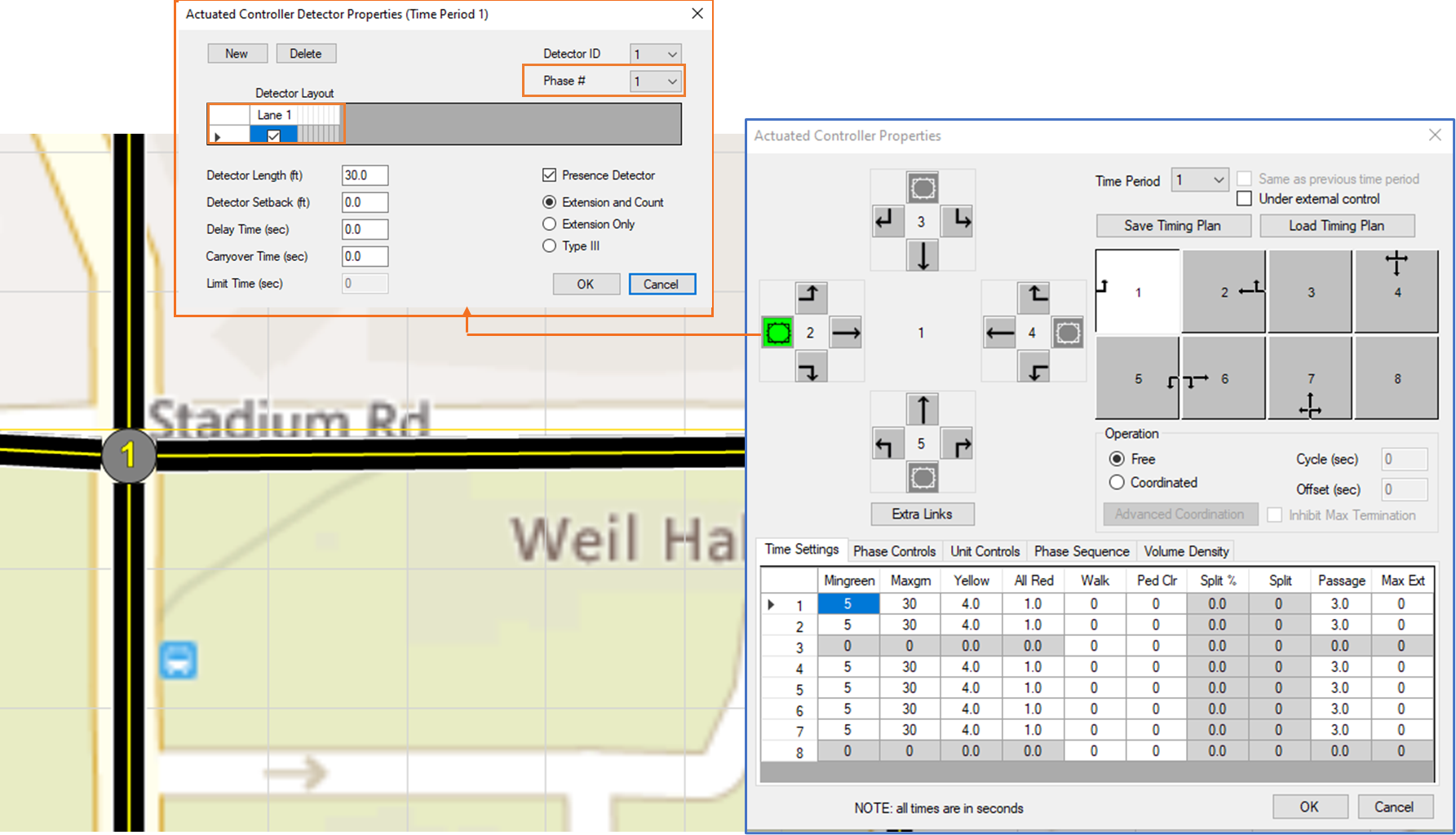
Make sure fully actuated signal controllers have detectors set at all appropriate link approaches. Independent detectors should be set for each lane used by the corresponding signal phases.
