
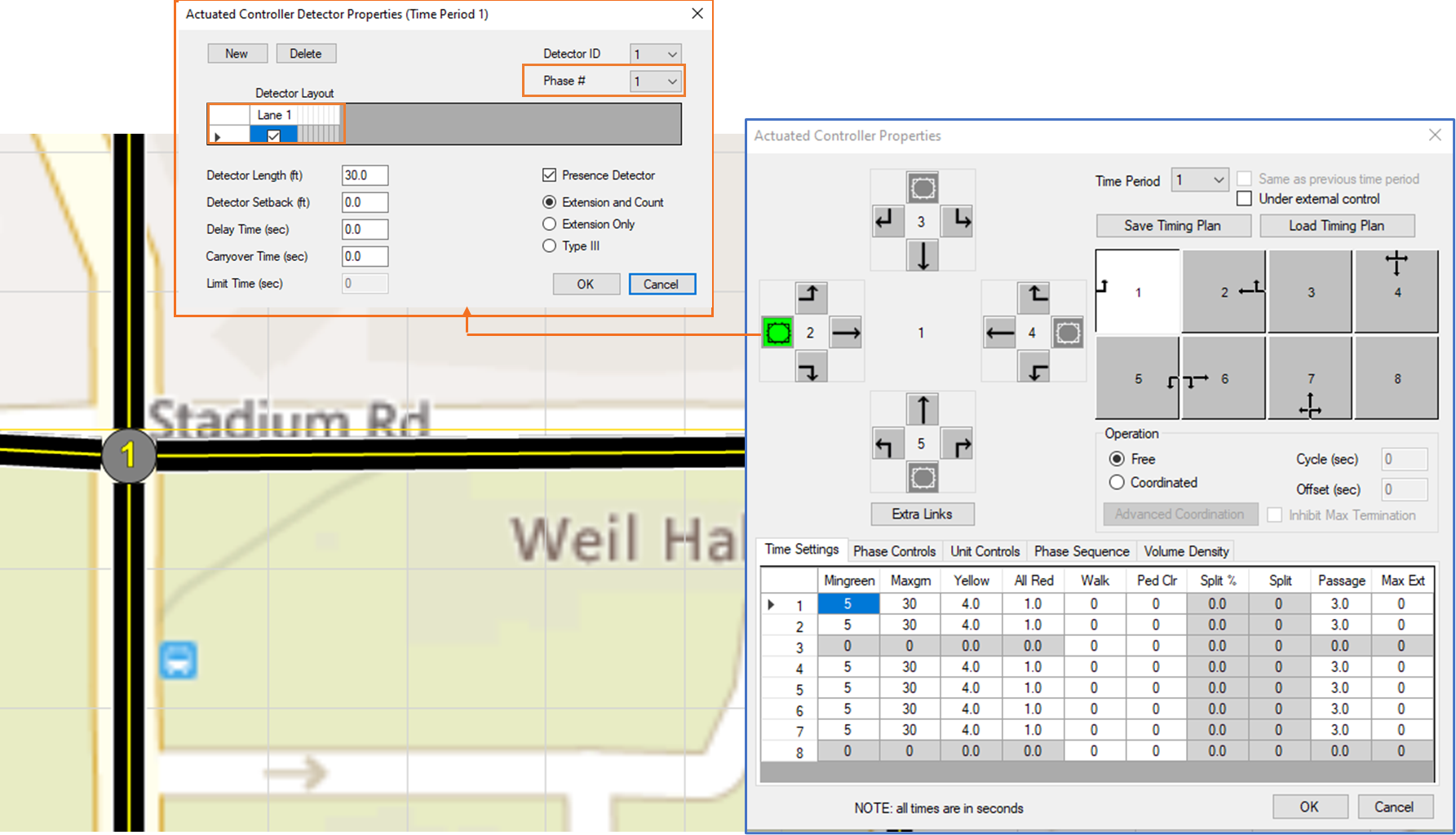
Make sure fully actuated signal controllers have detectors set at all appropriate link approaches. Independent detectors should be set for each lane used by the corresponding signal phases.
By default, freeway capacity is approximately 2200 vehicles per lane per hour (vplph) in FRESIM. Highway Capacity Manual chapter 8 indicates that freeway capacities between 1700 vplph and 2600 vplph have been measured across the U.S. By calibrating various settings, FRESIM can be made to simulate a wide range of freeway capacities. Many of these freeway calibration settings can be coded in TSIS, under Network > FRESIM Setup. A sample input file called “Max Capacity.trf” illustrates capacities above 3000 vplph, even though such high capacities are unrealistic. To access this sample file, click on the “Sample Data Files” link at the top of this page. Although there is no explicit input parameter for freeway capacity, some of the input parameters potentially affecting freeway capacity include:
- threshold speed and distance for anticipatory lane changing
- global and link-specific car following sensitivity factor
- minimum separation for vehicle generation
- off-ramp warning sign distance
- free flow speed distribution
- vehicle lengths
Note that when conditions are oversaturated in the real world, multi-period simulation may be needed, to allow all input volumes to be served. The beginning of the first time period should be undersaturated, and the end of the final time period should be undersaturated.
In TSIS there is no automated technique for coding a channelized right-turn lane with an island, so one must code a couple of extra surface nodes to define the channelized right-turn link. At that point, curvature of the channelized right-turn could be coded by making the link length longer than the distance between node coordinates, and adjusting the curvature using the Edit Curvature feature found by right-clicking the link.
The limit for standard coding at a single entry node is 9999 vph. There are a couple of ways around that limitation. One would be to create two or more entry nodes using 9999 vph each, and then funnel that traffic onto the entry link. Another way would be to specify the entry volume in terms of vehicle counts. This allows 9999 vehicles to be specified as a vehicle count, and allows counts as often as every minute. Therefore the maximum that could be entered is 9999 vehicles per minute, although there is an internal limitation of 1500 vehicles per minute, so the absolute maximum for one entry node is 90000 vehicles per hour.
Overall vehicular demand in the network is such that queues from downstream intersections are blocking upstream intersections. This is having the effect that traffic cannot cross from the side streets and network-wide gridlock quickly occurs as the queues build back to subsequent intersections. In reality, the city has implemented a “Do Not Enter” policy, where traffic is supposed to wait until vehicles clear the intersection before they proceed. Is it possible to include the “Do Not Enter” condition in the model?
In TSIS, you can select Network > NETSIM Setup > Spillback, to calibrate the probability of vehicles joining spillback.
Turn pockets can only be used to serve one type of turn movement, so U-turners and left-turners cannot both use turn pocket lanes. Therefore in some situations it may be preferable to define a full-length, channelized turn lane to model a turn pocket that serves both U-turns and left-turns. In other cases, left-turn pocket lanes could be used as U-turn lanes, and the adjacent full lanes could be channelized for left-diagonal turns.
When U-turns and left-turns share the same lane at a signalized intersection, it is best to simulate this by defining an actuated controller. To handle shared lane U-turns and left-turns at a pre-timed controller, it is preferable to code the signal as actuated, but specify max recall to emulate pre-timed operation. Similarly, when U-turns and left-turns move during the same signal interval, actuated control should be used.
Suppose that split phasing needs to be coded in the east-west direction; all eastbound movements, followed by all westbound movements. East-west actuated control involves dual ring phase numbers 3, 4, 7, and 8. However, phases 3 and 7 are designed to run simultaneously, because these phases are typically used to represent the leading and overlapping left-turns. Phases 4 and 8 must also time concurrently. Coding all of the eastbound movements in phase 3, and all of the westbound movements in phase 4, would achieve split phasing. The other option would be to code all of the eastbound movements in phase 7, and all of the westbound movements in phase 8.
There is no way to taper a lane in CORSIM, and CORSIM does not consider tapers. TRAFVU draws a taper for aesthetic purposes only. The auxiliary lane ends abruptly in all cases. In CORSIM, vehicles can only be in one lane, and there is no provision for partial lanes, or to be in two lanes at once. There is no such thing as a lane position of half way in between one lane and another. Users are supposed to end the lane to be dropped at the point where two vehicles can no longer comfortably fit side-by-side. That way there won’t be more storage on the lane to be dropped than there is in real life.
Version 6 can accomplish this by loading both TNO files, copying the link-node diagram from one of them, and then pasting it into the second one. Any conflicts between node numbers and node coordinates will be automatically resolved. After this, it might be necessary for the user to manually code one or more links, to allow vehicles to travel between the previously unconnected networks. Versions 5.0 and 5.1 of TSIS were not capable of automatically merging two TNO networks into one.
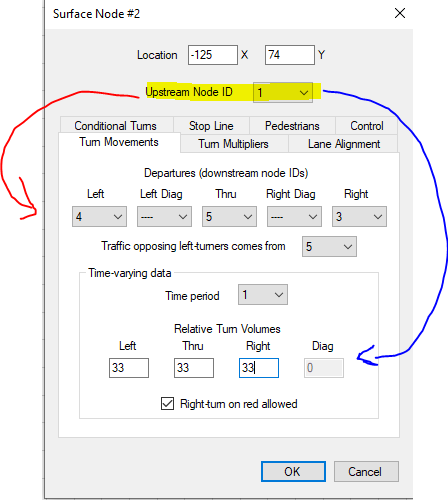
For each node, users must specify turning movements and volumes for every linked upstream node (highlighted). Each traffic movement from an upstream node must be linked to at least one destination node, ensuring that the destination is not the same as the upstream node. Additionally, users must detail the expected traffic volume for these turns, which can be presented as a total demand, in proportional ratios, or as a percentage out of 100. When specifying to/from entry/exit nodes, there must only be a through movement of volume 100. It’s important to note that TSIS-CORSIM will automatically generate turning movements and volumes when attaching links between nodes, but users should verify their results, as only some approaches may be automatically modeled.
Two-way left-turn lanes are easily modeled by coding a node with left-turn pockets at any location along the link where left-turns can be made.
There is currently no metric inputs for CORSIM. HCS and TRANSYT-7F can accept metric unit inputs and automatically perform unit conversion when generating CORSIM input files.
Highways can be directly connected using FRESIM ramp links. For a simple highway-to-highway connection an off-ramp from the first highway may connect to an on-ramp onto the next highway. However, there are limitations that sometimes require the use of NETSIM links. When using FRESIM only, it is not possible to have a ramp that splits into two ramps, and it is not possible to have two ramps that merge into one.
There is a known problem concerning non-standard characters. The XML parser in TSIS can only process the standard character set, which includes all ASCII codes less than or equal to 127. The extended character set, which includes all ASCII codes greater than 127, is not supported. For example, when an input file contains the special character û, when it is replaced with a standard u the problem is eliminated.
There are a few things you can try to better control vehicle paths and lane selection in NETSIM.
- Channelization codes. NETSIM can be calibrated to produce the correct lane utilization by using special channelization codes. For this to work, it is necessary to select a channelization code for a turn movement (usually diagonal) that does not exist. Just apply the diagonal channelization code to a particular lane, assign a percentage of turns to that diagonal movement, and then specify the correct left-turn, through, or right-turn receiving node for that diagonal movement.
- Turning movements that feed the downstream through node, sometimes used in conjunction with a dummy node. This is a coding technique that encourages a certain percentage of vehicles to move into the outer most lanes.
- Conditional turning movements. This input specification prevents vehicles from making consecutive unrealistic turn movements.
- Distance over which drivers will perform a lane change. Setting it to a larger distance causes the goal lanes to be set farther upstream. The default is only 300 feet. Essentially the logic uses that distance times the required number of lane changes to determine how far upstream to set goal lanes for each vehicle.
- Driver familiarity with path distribution. By default 90% of drivers know their goal lane, so some users change this to 100% so that drivers will make better decisions in advance.
- Interchanges. Origin-destination data may be specified between nodes containing paths with 10 links or fewer.
- Driver cooperation. The percentage of cooperative drivers can be increased. The default is 50%.
