Dr. Bob (Behzad) Aghdashi

Guoqian Yan

Dr. Gustavo de Andrade
The Highway Capacity Software 2023 (HCS 2023) introduces new mapping features to leverage Geographic Information Systems (GIS) databases and Bing Map resources for planning and operation studies of freeways. The map-based segmentation tools promote modeling efficiency while ensuring HCM segmentation compliance.
Segmentation Database Tool
The Highway Capacity Software 2023 provides access to public agency databases to ensure HCM-compliant freeway analysis. Segmentation and demand data are imported directly from the databases for a selected facility stretch and study period.
A research project by Aghdashi et al. (2019) describes in detail the development of this methodology, database assembly and software implementation for the case of North Caroline state. Depending on the data available for a state, the online segmentation database enables to set up the model in a matter of minutes and allow software end users to perform any single-day and whole-year freeway such as work zone or reliability analyses.
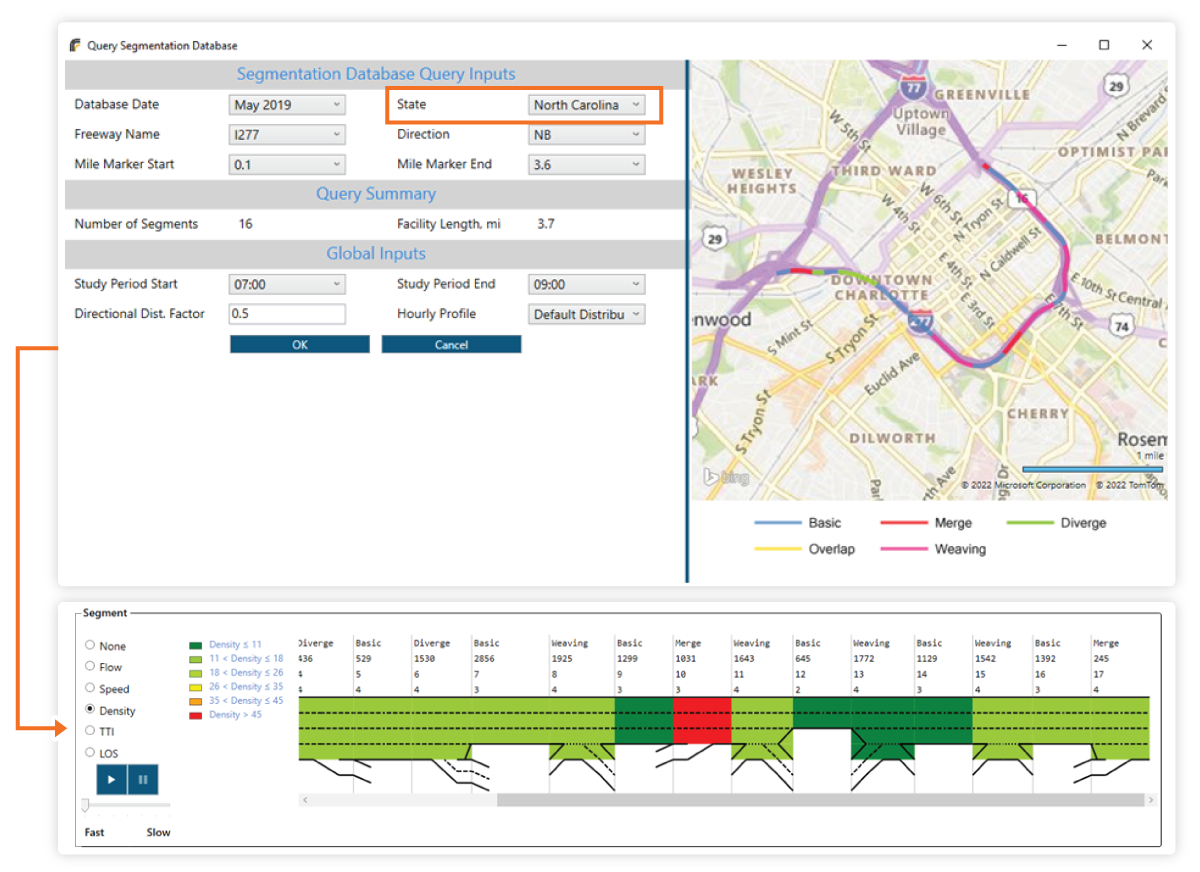
Segmentation and demand data are directly imported from public agency databases
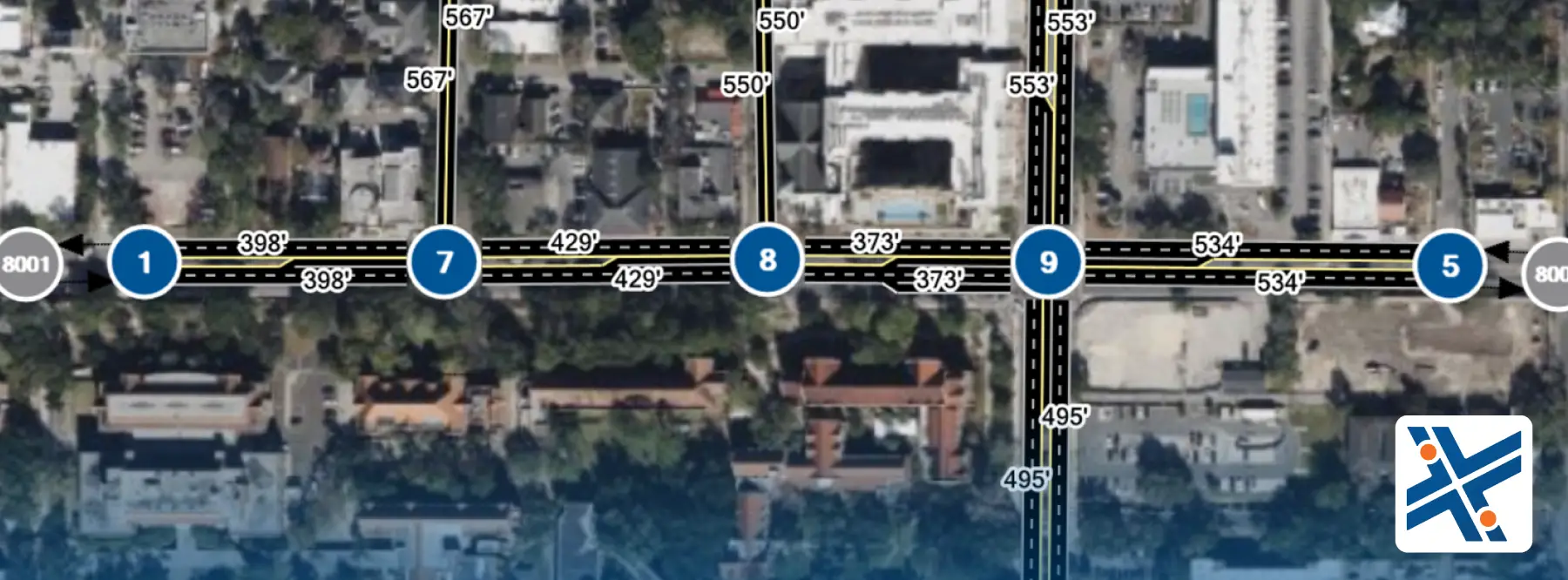
Map-Based Segmentation Tool
The Freeways module also includes a new tool for segmenting freeway facilities on a Bing Maps background.
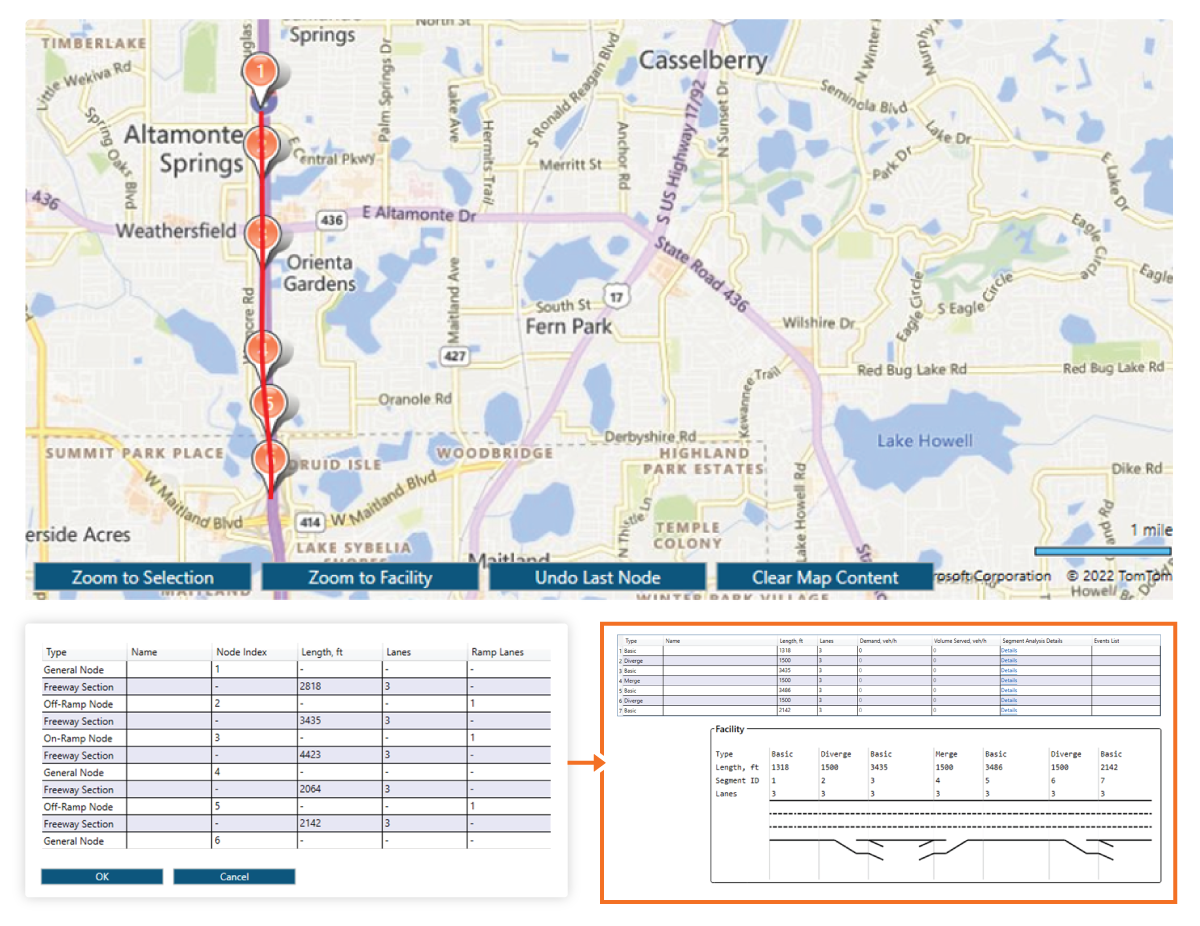
Users can pinpoint on and off-ramp on the map and HCS will build a detailed HCM-ready facility
The user only needs to pinpoint on and off-ramp points on the freeway, and HCS will build the facility with resulting merge/diverge, weavings and basic segments according to the HCM segmentation rules for freeways. These rules are:
- When two adjacent merge and diverge segments are connected by an auxiliary lane, the entire segment is coded as a weaving segment. The weave influence area extends 500 ft upstream and 500 ft downstream of the two respective gore areas.
- When the gore-to-gore length between two adjacent merge and diverge segments exceeds 3,000 ft and no auxiliary lane exists, the section is coded as a series of three segments (merge, basic, diverge). The basic segment length is the difference between the gore-to-gore spacing and 3,000 ft.
- When the gore-to-gore length of two adjacent merge and diverge segments is less than 3,000 ft but longer than 1,500 ft and no auxiliary lane exists, the section should be coded as a series of three segments, with the middle segment being defined as an overlap segment (merge, overlap, diverge) and used with both the merge and diverge segments to satisfy the 1,500 ft influence areas. In this case, the overlap segment length is the difference between 3,000 ft and the gore-to-gore spacing, and the merge and diverge segment lengths are equal to the gore-to-gore spacing minus 1,500 ft.
- If the ramp spacing is less than 1,500 ft without the addition of an auxiliary lane to connect the two gore areas, the 1,500 ft merge or diverge segment length is truncated at the adjacent ramp gore point.
- Any remaining unassigned segments that have been defined after all merge, diverge, weave, and overlap segments are labeled as basic segments.